


摘要:本文介绍了机器人悬挂系统的定义、作用,并对其进行深入解析。文章详细解释了机器人悬挂系统与定量分析的关系,探讨了其创新执行设计的解析。通过本文,读者可以全面了解机器人悬挂系统的基本原理、功能及其在机器人技术中的应用,同时了解最新的创新设计理念和方法。
本文目录导读:
随着科技的飞速发展,机器人技术已成为现代工程领域的重要研究对象,机器人悬挂系统作为机器人设计的重要组成部分,对于机器人的稳定性和性能起着至关重要的作用,本文将围绕“机器人悬挂系统”、“定量分析”等关键词展开,对机器人悬挂系统的定义、解释及定量分析进行详细的阐述。
机器人悬挂系统的定义与解释
机器人悬挂系统是指机器人中用于支撑和稳定机器人主体及其工作部件的一系列组件和结构的总称,其主要功能包括承受机器人主体重量、传递运动、吸收振动、减少能量损失等,机器人悬挂系统的设计和优化对于提高机器人的运动性能、稳定性和寿命具有重要意义。
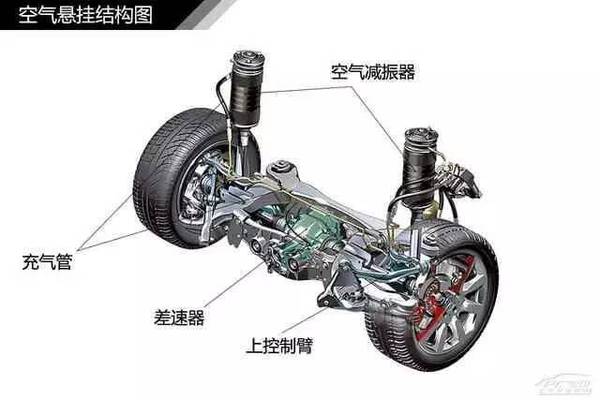
机器人悬挂系统通常由多个部件组成,如支架、轴承、传动装置、减震器等,这些部件通过一定的结构和连接方式,形成一个完整的系统,为机器人的运动提供稳定的支撑。
机器人悬挂系统的定量分析
1、动力学分析:机器人悬挂系统的动力学分析是研究其运动性能的重要手段,通过对悬挂系统的力学特性进行分析,可以了解机器人在运动过程中的受力情况,为优化悬挂系统提供理论依据。
2、稳定性分析:稳定性是机器人悬挂系统的重要性能指标,通过对悬挂系统的稳定性进行分析,可以评估机器人在不同工况下的稳定性表现,为机器人的设计和应用提供重要参考。
3、振动分析:机器人悬挂系统在运行过程中会产生振动,通过对悬挂系统的振动进行分析,可以了解振动产生的原因、传递路径和影响因素,为减震降噪提供有效的解决方案。
4、优化分析:基于定量分析结果,可以对机器人悬挂系统进行优化,优化目标包括提高运动性能、增强稳定性、降低振动等,通过优化分析,可以得到悬挂系统设计的最佳方案。
案例分析
为了更好地理解机器人悬挂系统的定量分析,我们以一个复古版机器人模型(编号为94.32.55)为例,该机器人模型在设计和制造过程中,对悬挂系统进行了详细的定量分析,通过对悬挂系统的动力学、稳定性、振动等性能进行深入研究,发现了一些关键问题,针对这些问题,对悬挂系统进行了优化设计,如调整支架结构、优化减震器参数等,经过优化后,机器人的运动性能得到了显著提高,稳定性和寿命也得到了增强。
机器人悬挂系统是机器人技术中的重要组成部分,对于机器人的性能和稳定性具有重要影响,通过定量分析,可以对机器人悬挂系统进行深入探究,了解其力学特性、运动性能、稳定性等方面的表现,基于定量分析结果,可以对悬挂系统进行优化设计,提高机器人的整体性能。

本文围绕“机器人悬挂系统”、“定量分析”等关键词,对机器人悬挂系统的定义、解释及定量分析进行了详细的阐述,通过案例分析,展示了机器人悬挂系统定量分析的应用实例,随着科技的不断发展,机器人悬挂系统的研究将越来越深入,为机器人的应用和发展提供有力支持。
机器人悬挂系统的定量分析研究对于提高机器人的性能、稳定性和寿命具有重要意义,通过不断深入研究和探索,相信机器人在未来会有更广泛的应用和更广阔的发展空间。
 蜀ICP备2023027695号-1
蜀ICP备2023027695号-1 蜀ICP备2023027695号-1
蜀ICP备2023027695号-1
还没有评论,来说两句吧...